


We are looking forward to the 22nd International Conference on Mobile and Ubiquitous Multimedia. This year, the conference will be in Vienna and we are happy to present three contributions.
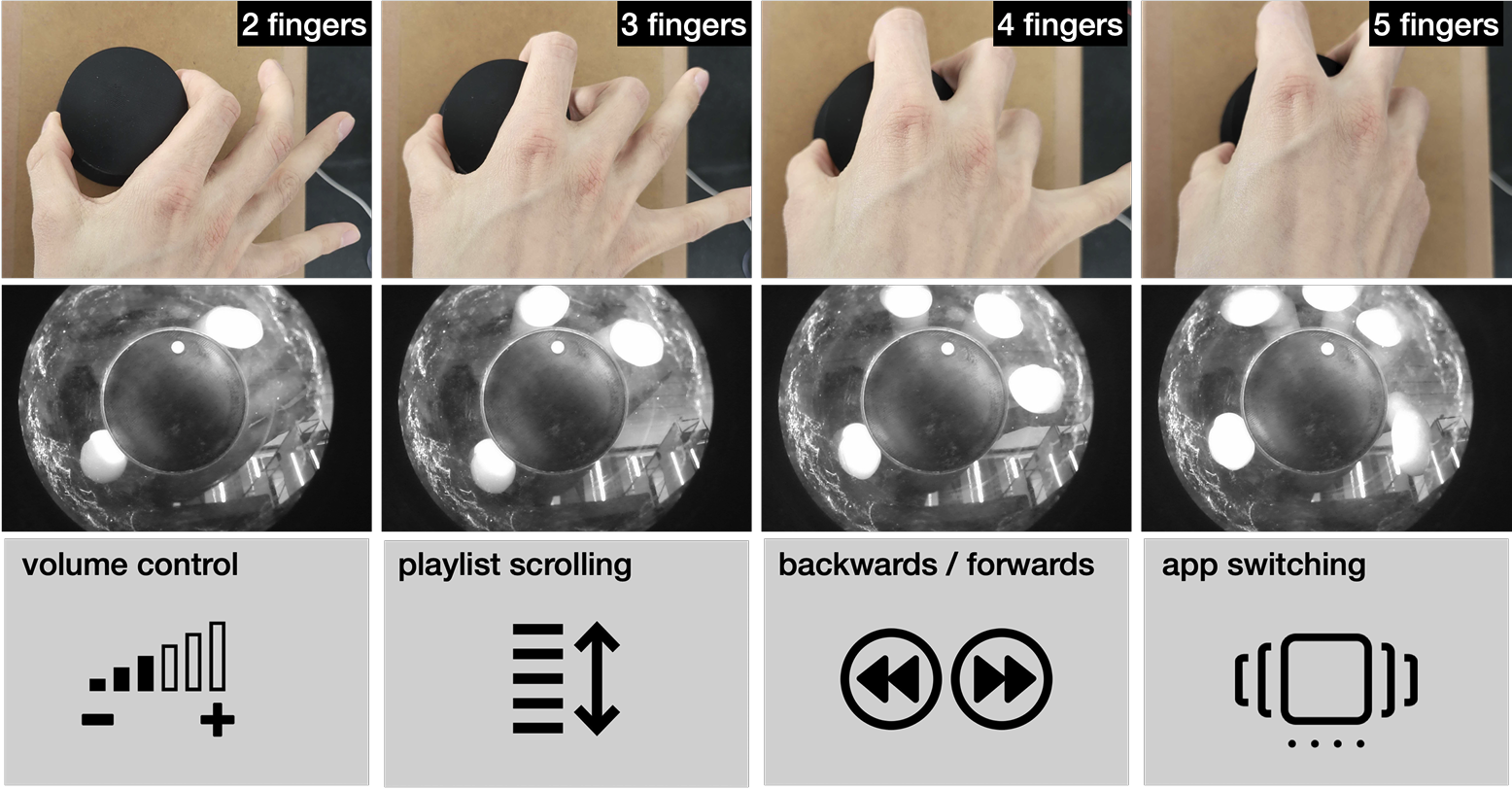
MultiKnob: Extending the Interaction Space of Rotary Knobs by Multi-touch-based Grasp Recognition
Rotary knobs are widely used input devices for computers, household appliances, cars and other machinery. So far, their input capabilities are limited since the rotation of a knob only controls one single parameter. This paper presents the concept of a rotary knob that is capable of recognizing a user’s grasp for controlling different parameters, called MultiKnob. We contribute the hardware and software of a knob for detecting how many fingers are used when touching it. It uses IR light and FTIR-based multi-touch recognition. Within a target acquisition study, we used this new feature for allowing users to select the speed of a cursor for solving tasks. We found that users are able to leverage this novel device: Our 24 participants could make use of this new knob for being faster when moving a cursor into a target area compared to a fixed slow speed knob, and having less overshoots compared to a fixed fast speed knob. Further, we found that the MultiKnob gave rise to the strategy of changing grasp for switching from a fast and coarse-grained cursor movement to a slow and fine-grained cursor movement. We discuss different applications for using such a knob.
Files for 3D printing the material, the source code for finger recognition and our study data are available on a GitHub repository for reproducing the device and our study.
 | : Extending the Interaction Space of Rotary Knobs by Multi-touch-based Grasp Recognition. In: Proceedings of the 22nd International Conference on Mobile and Ubiquitous Multimedia, ACM, New York, NY, USA, 2023, (Honorable Mention Award ). |
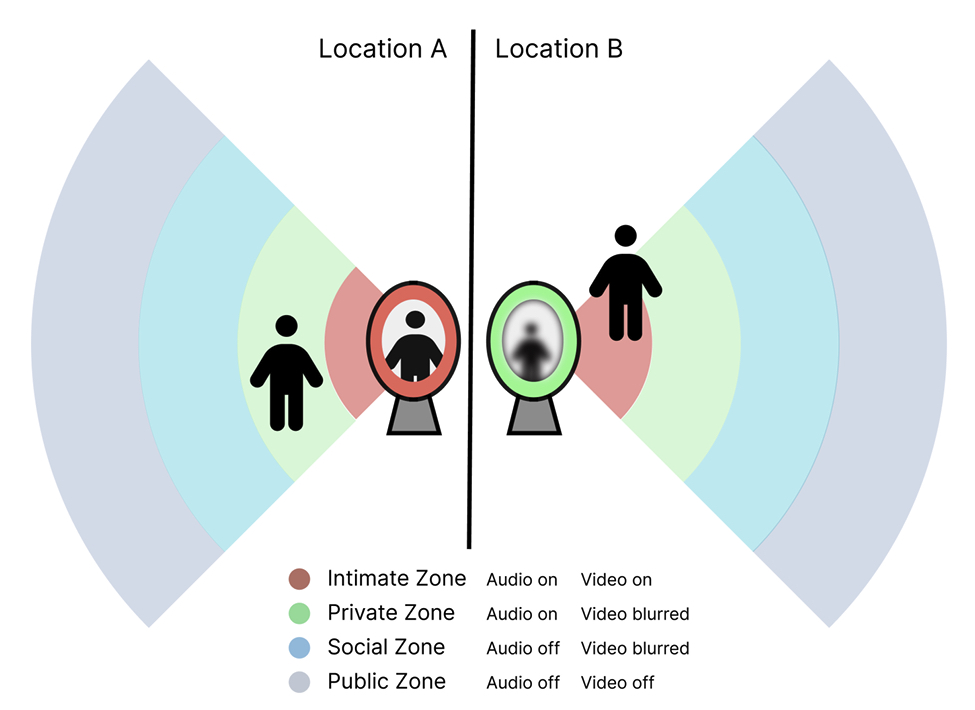
The Friend’s Egg
Space is an essential part of social communication. The distance individuals choose when communicating with each other conveys non-verbal information and social signals. In remote, audiovisual communication, though, spatial information is hardly considered in the technical set-ups, often arbitrary and unequally perceived by the participants. In this article, we describe an audiovisual communication system that takes distance into account. Based on a display equipped with depth sensors, we divide the space into different zones and use human position in the room to enable interaction between remote participants. This way, the physical availability of a communication partner is imitated and distance between individuals can be used naturally to convey non-verbal information in remote set-ups.
 | : The Friend’s Egg: A Prototype for Spatially Aware, Interpersonal, Audiovisual Remote Communication to Maintain Friendship over Distance. In: Proceedings of the 22nd International Conference on Mobile and Ubiquitous Multimedia, ACM, New York, NY, USA, 2023. |
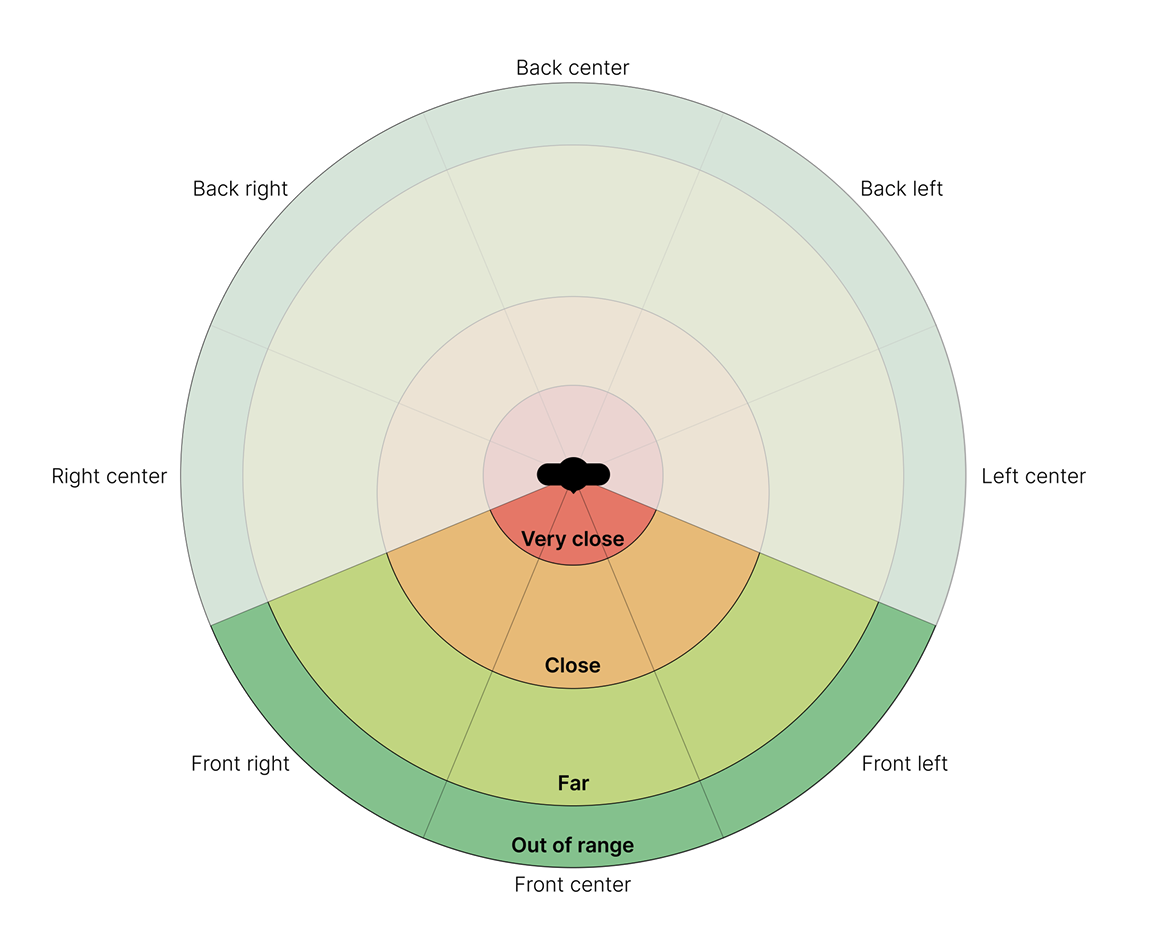
EMS-based Spatial Orientation
Navigating the environment can be challenging, especially when faced with vision or hearing limitations, such as darkness and visual impairments. To address this issue, we propose using electrical muscle stimulation (EMS) to convey spatial information and assist users in avoiding obstacles. We map direction to EMS channels and distance to current intensity, with force-feedback for closer proximity and tactile EMS feedback for greater proximity. An experimental study (n=12) was conducted to evaluate the concept and gain insights into the qualitative perception of EMS. Participants were able to accurately estimate encoded distance (85.7% accuracy) and direction (99.5% accuracy). Our findings demonstrate the feasibility and effectiveness of using tactile and force feedback EMS to convey spatial information comprehensibly.
 | : Towards Improving Spatial Orientation using Electrical Muscle Stimulation as Tactile and Force Feedback. In: Proceedings of the 22nd International Conference on Mobile and Ubiquitous Multimedia, ACM, New York, NY, USA, 2023. |
We are looking forward to meeting you! Works will be presented by the first authors David, Vimal and Sabine.